¡Bienvenido a Arduino!
Hoy vamos a aprender a construir sistemas electrónicos programables
En esta aventura descubrirás cómo controlar componentes electrónicos con código
¿Qué es Arduino?
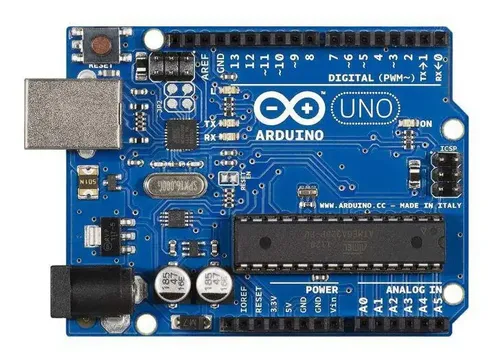
Una placa electrónica programable
Arduino es una placa microcontroladora de código abierto que permite a cualquiera crear dispositivos electrónicos interactivos. Es perfecta para aprender programación y electrónica.
¿Para qué sirve?
✅ Controlar luces LED
✅ Leer sensores (temperatura, luz, etc.)
✅ Mover motores y servos
✅ Crear proyectos interactivos
✅ Automatizar sistemas
¿Qué es un Microservo Motor?
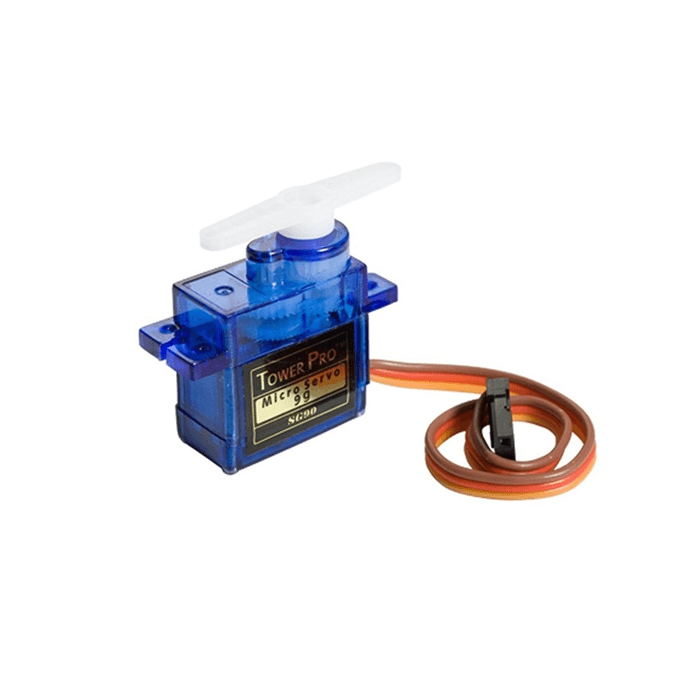
Un motor de precisión controlable
Un microservo es un pequeño motor que puede girar a ángulos específicos (0°, 90°, 180°, etc.). A diferencia de un motor normal que gira continuamente, el servo se detiene exactamente donde le ordenas.
¿Cómo funciona?
🔄 Recibe una orden desde el código Arduino
🔄 Gira a un ángulo específico
🔄 Se detiene en esa posición
🔄 Permanece allí hasta recibir otra orden
¿Para qué se usa?
🎯 Abrir/cerrar puertas
🎯 Controlar brazo robótico
🎯 Mover cámaras
🎯 Controlar posición de algo
¿Qué es Tinkercad?
Tu simulador de Arduino en línea
Tinkercad es una plataforma online gratuita que te permite:
✨ Simular circuitos Arduino sin hardware - Prueba tu código antes de usar componentes reales
✨ Ver resultados en tiempo real - Observa cómo se mueven los servos
✨ Aprender de forma segura - Sin riesgo de dañar componentes
✨ Compartir proyectos - Colabosa con otros estudiantes
Hoy haremos:
Crearemos un circuito con un botón que controla un microservo. Cuando presiones el botón, el servo girará de 0° a 180° y volverá.
El Código Arduino
Este es el código que vamos a usar en Tinkercad. ¡Puedes copiarlo con el botón verde!
Explicación Paso a Paso
1️⃣ Librerías y Definiciones
Servo miServo; - Crea un objeto servo que controlaremos
int pinServo = 9; - El servo está conectado al pin 9
int pinBoton = 2; - El botón está conectado al pin 2
2️⃣ Función Setup() - Se ejecuta una sola vez
pinMode(pinBoton, INPUT); - Configuramos el botón como entrada (leeremos señales)
3️⃣ Función Loop() - Se repite constantemente
if (buttonState == HIGH) - Si el botón está presionado (valor HIGH)...
4️⃣ Movimiento del Servo
miServo.write(angulo); - Ordena al servo a girar al ángulo especificado
delay(15); - Espera 15 milisegundos para que el movimiento sea suave
Luego hace lo inverso: de 180° a 0° para volver a la posición inicial
¡Es Hora de Practicar!
Este es el código que debes copiar y pegar en TinkerCAD:
📋 Instrucciones para Tinkercad:
Paso 1: Haz clic en el botón verde "IR A LA PRÁCTICA" abajo
Paso 2: Cuando TinkerCAD te pida "Código de Clase", escribe: D9N6XNIJT
Paso 3: TinkerCAD te pedirá tu nombre. Escribe tu nombre + primer apellido sin espacios:
Ejemplo: Juan López → JuanLópez
Paso 4: Copia el código de arriba (usa el botón gris)
Paso 5: En TinkerCAD, pega el código en el editor y ¡comienza a practicar!
💡 Tip importante:
Cuando TinkerCAD te pida el nombre de usuario para la clase, debes escribir exactamente: Tu nombre + Tu primer apellido sin espacios
Esto es para que el profesor pueda identificar tus trabajos en la clase.